Hybrid aerial-aquatic microrobot
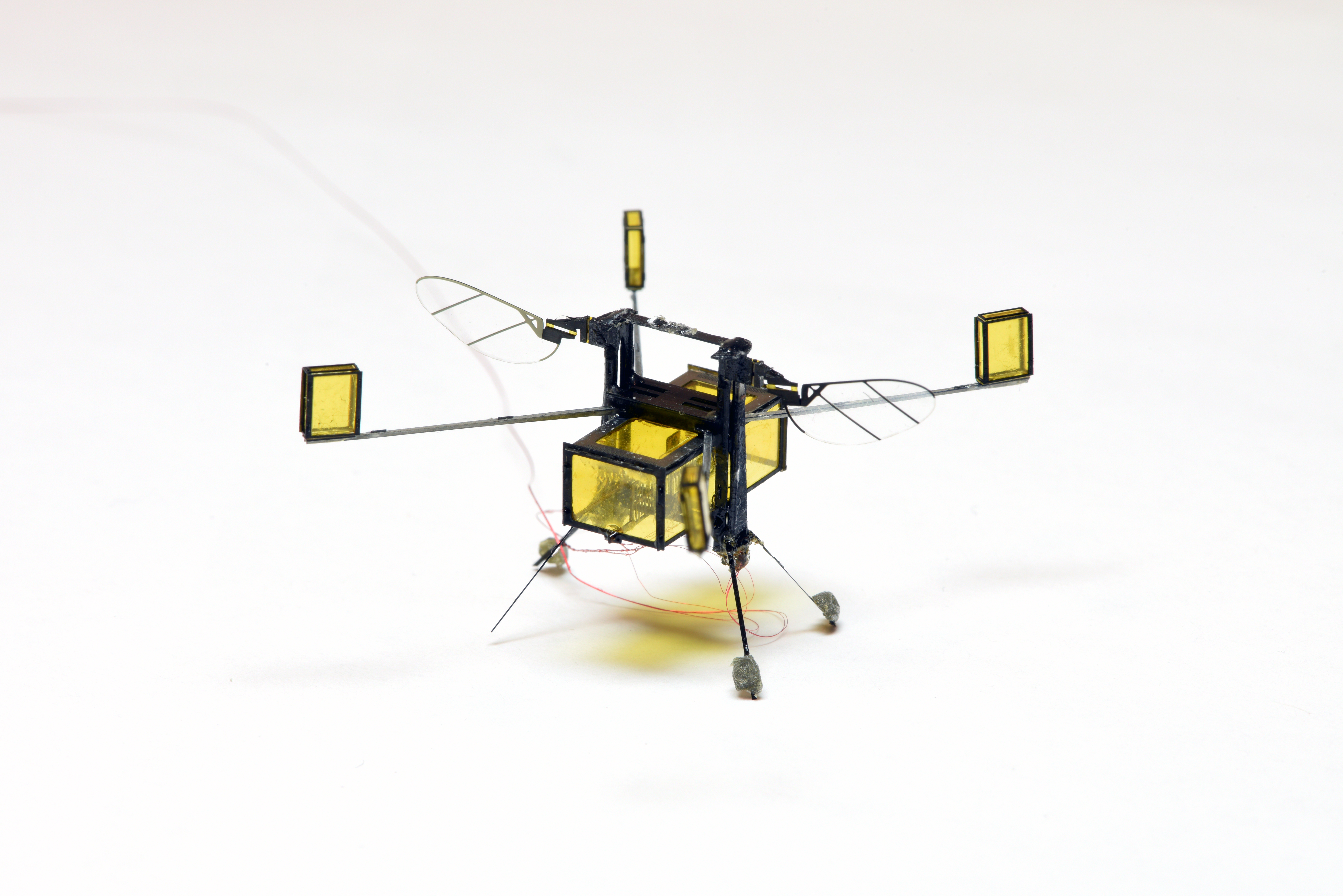
This is the first insect scale robot capable of flying, swimming, and impulsively taking off from water.
Flapping wing locomotion is seen in aerial insects (e.g. honeybees) and in aquatic species (e.g. sea plankton). Through constructing 3D CFD numerical simulations and performing at-scale flapping experiments, we found that flapping propulsion in air and in water can be achieved in the same device by appropriately changing the operating frequencies. We developed a 175mg, hybrid aerial-aquatic, flapping wing, microrobot that is capable of flying, swimming, transitioning from air-to-water, and impulsively taking off from the water surface.
Click on the links below for more interesting videos: