by RLE at MIT | May 2, 2019 | RLE Recent Papers
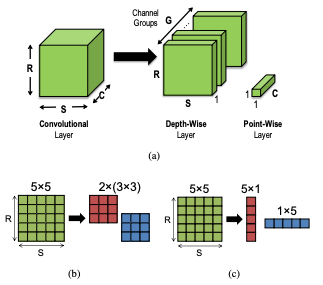
Yu-Hsin Chen, Tien-Ju Yang, Joel Emer, and Vivienne Sze doi: arXiv:1807.07928 Abstract: The design of DNNs has increasingly focused on reducing the computational complexity in addition to improving accuracy. While emerging DNNs tend to have fewer weights and...
by RLE at MIT | May 1, 2019 | RLE Recent Papers
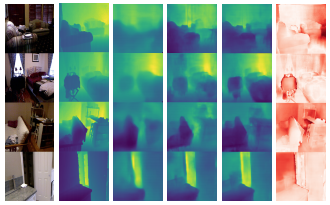
Diana Wofk, Fangchang Ma, Tien-Ju Yang, Sertac Karaman, Vivienne Sze doi: arXiv:1903.03273 Abstract: Depth sensing is a critical function for robotic tasks such as localization, mapping and obstacle detection. There has been a significant and growing interest in...
by RLE at MIT | May 1, 2019 | RLE Recent Papers
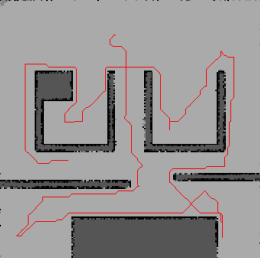
Zhengdong Zhang, Trevor Henderson, Vivienne Sze, Sertac Karaman Abstract: Information-based mapping algorithms are critical to robot exploration tasks in several applications ranging from disaster response to space exploration. Unfortunately, most existing...
by RLE at MIT | Apr 20, 2019 | RLE Recent Papers
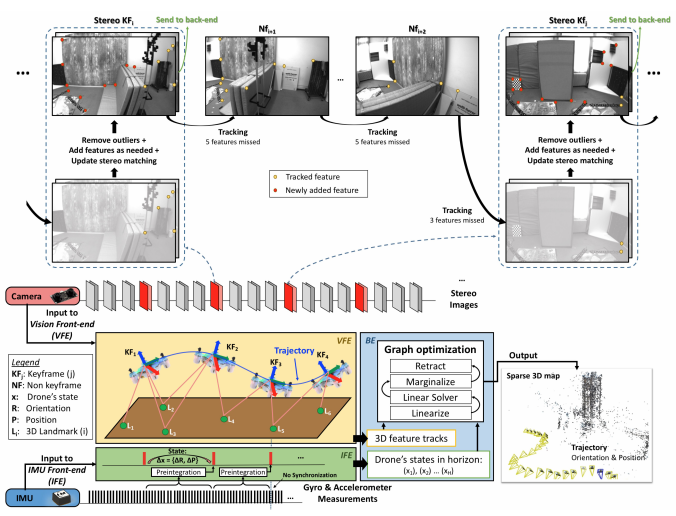
Amr Suleiman, Member, Zhengdong Zhang, Student Member, Luca Carlone, Sertac Karaman, Member, and Vivienne Sze doi: 10.1109/JSSC.2018.2886342 Abstract: This paper presents Navion, an energy-efficient accelerator for visual-inertial odometry (VIO) that...

by RLE at MIT | Apr 9, 2019 | RLE Recent Papers
Alexander Ratner, Dan Alistarh, Gustavo Alonso, Peter Bailis, Sarah Bird, Nicholas Carlini, Bryan Catanzaro, Eric Chung, Bill Dally, Jeff Dean, Inderjit S. Dhillon, Alexandros Dimakis, Pradeep Dubey, Charles Elkan, Grigori Fursin, Gregory R. Ganger, Lise Getoor,...
