by RLE at MIT | May 2, 2019 | RLE Recent Papers
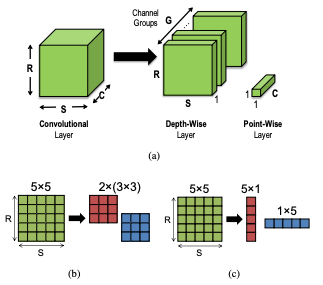
Yu-Hsin Chen, Tien-Ju Yang, Joel Emer, and Vivienne Sze doi: arXiv:1807.07928 Abstract: The design of DNNs has increasingly focused on reducing the computational complexity in addition to improving accuracy. While emerging DNNs tend to have fewer weights and...
by RLE at MIT | May 1, 2019 | RLE Recent Papers
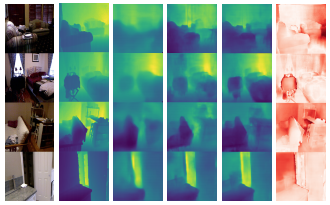
Diana Wofk, Fangchang Ma, Tien-Ju Yang, Sertac Karaman, Vivienne Sze doi: arXiv:1903.03273 Abstract: Depth sensing is a critical function for robotic tasks such as localization, mapping and obstacle detection. There has been a significant and growing interest in...
by RLE at MIT | May 1, 2019 | RLE Recent Papers
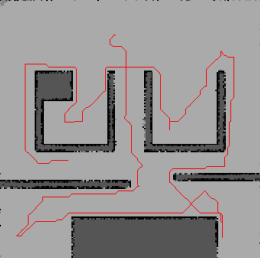
Zhengdong Zhang, Trevor Henderson, Vivienne Sze, Sertac Karaman Abstract: Information-based mapping algorithms are critical to robot exploration tasks in several applications ranging from disaster response to space exploration. Unfortunately, most existing...
